casual write-up about AI and Modular Robotics
(IoT, Robotics) อยากทำ write up ว่า modular/self essembled robots ที่ผ่านมามีการประยุกต์ใช้ ML หรือ NN แบบไหน ในการประกอบตัวเอง, เคลื่อนไหวประสานงานกัน:eyes: inspiration: Jamie paikทำ Lab ที่ RRL-EPFL
What is modular robots
from https://www.sciencedirect.com/science/article/abs/pii/S0094576521004938
- This term was introduced by Fukuda with the biologically-inspired CEllular roBOT (CEBOT) in the late 1980s. from https://www.robotpark.com/academy/all-types-of-robots/modular-robots/
- Each module has 2 or more connectors, and some also contain actuators to manipulate its location.
- it can be generally classified into several architectural groups by the geometric arrangement of their unit (lattice vs. chain). Several systems exhibit hybrid properties.
Why modular robots?
-
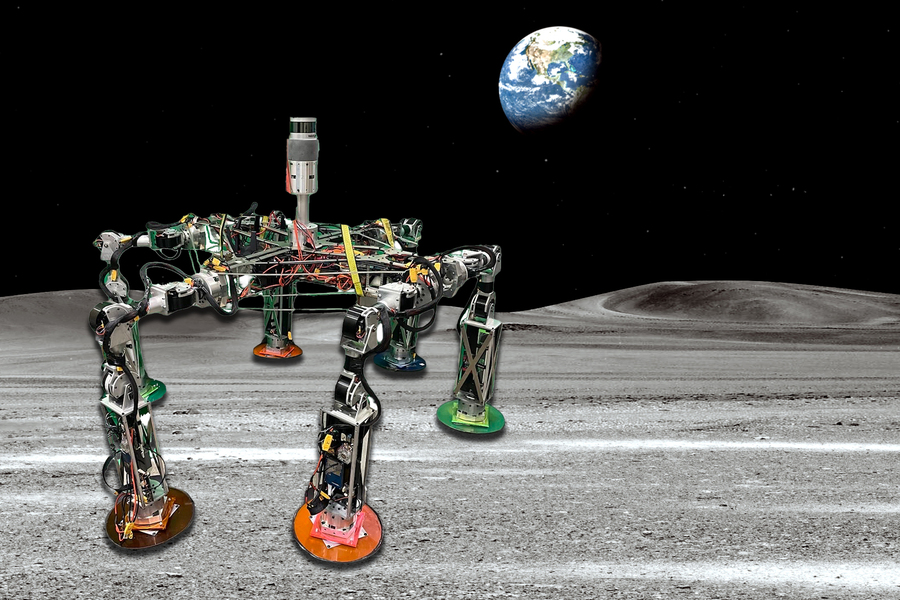
space exploration
-
disaster relief
- its ability to change its own shape according to the environment for crawling, rolling, walking, and much more is suitable to this task.
-
from https://www.robotpark.com/academy/all-types-of-robots/modular-robots/
- ability to physically adapt, grow, heal, and even self replicate.
Interesting resources:
Modular Robotics: When You Want More Robots In Your Robot https://hackaday.com/2018/05/10/modular-robotics-when-you-want-more-robots-in-your-robot/
Modular Robots: Mechanism and Control Design https://www.ri.cmu.edu/project/modular-robots-mechanism-and-control-design/
- keywords: GNN, model-based reinforcement learning algorithms
- input a robot design, and outputs a controller for that design.
- each module has DNN that get inputs from sensor measurements and output as actuator commands
- messages passed from/to its neighbors (full robot sensors) assembling into GNN that output full robot commands
Learning Modular Robot Locomotion from Demonstrations(2022) https://arxiv.org/abs/2210.17491 Keywords: Reinforcement and imitation learning(RL+IL)
- use RL for train control policy(p.2)
- IL for behavioral cloning
Trinity: A Modular Humanoid Robot AI System(2025) https://arxiv.org/abs/2503.08338
- RL, LLM, and VLM
- Use LLM to command robot’s movement (task planner)
- RL for mobility
- not that modular, but it pique my interests.
TEDTalk about Robogami (some of them are modular)
Mori: A Modular Origami Robot https://ieeexplore.ieee.org/document/7907345
- command it to move with quasi-2-D to 3-D configurations.
- what interesting about this paper: 100+ cites in this paper -> inspired and linked to many latest cool origami, robots, virtual reality projects.
- e.g. Shiftly: A Novel Origami Shape-Shifting Haptic Device for Virtual Reality(2025)